In a highly anticipated announcement that has sent ripples through the technology and automotive sectors, prominent software developer and blogger Jeff Atwood, founder of Coding Horror and co-founder of Stack Overflow, has revealed a $10,000 friendly wager with legendary game programmer and aerospace engineer John Carmack. The high-stakes bet, which will benefit a 501(c)(3) charity of the winner’s choice, centers on the ambitious timeline for the widespread commercial availability of fully autonomous vehicles. Specifically, the wager stipulates that by January 1st, 2030, SAE J3016 Level 5 self-driving cars must be commercially available for passenger use in major cities across the United States. Atwood is betting against this proposition, while Carmack, known for his pioneering work in 3D graphics and virtual reality, is betting for it.
The terms of the bet are precise, reflecting the technical complexities and high standards associated with advanced autonomous driving. "Completely autonomous" is defined according to the SAE J3016 Level 5 standard, meaning the vehicle must perform all driving tasks under all conditions, with the sole exceptions being natural disasters or emergencies. Crucially, this implies that a human passenger would simply enter the vehicle, select a destination, and require zero attention or interaction with the vehicle’s operation throughout the journey. This benchmark represents the pinnacle of autonomous capability, where the vehicle operates independently of human input across virtually every conceivable driving scenario. The definition of "major cities" further narrows the scope, specifying any of the top 10 most populous cities in the United States, including but not limited to New York City, Los Angeles, Chicago, Houston, and Phoenix. The $10,000 prize amount is also subject to mutual adjustment for inflation in 2030, ensuring its intended impact on the chosen charity remains substantial.
The Vision of Level 5 Autonomy: A Technical and Societal Leap
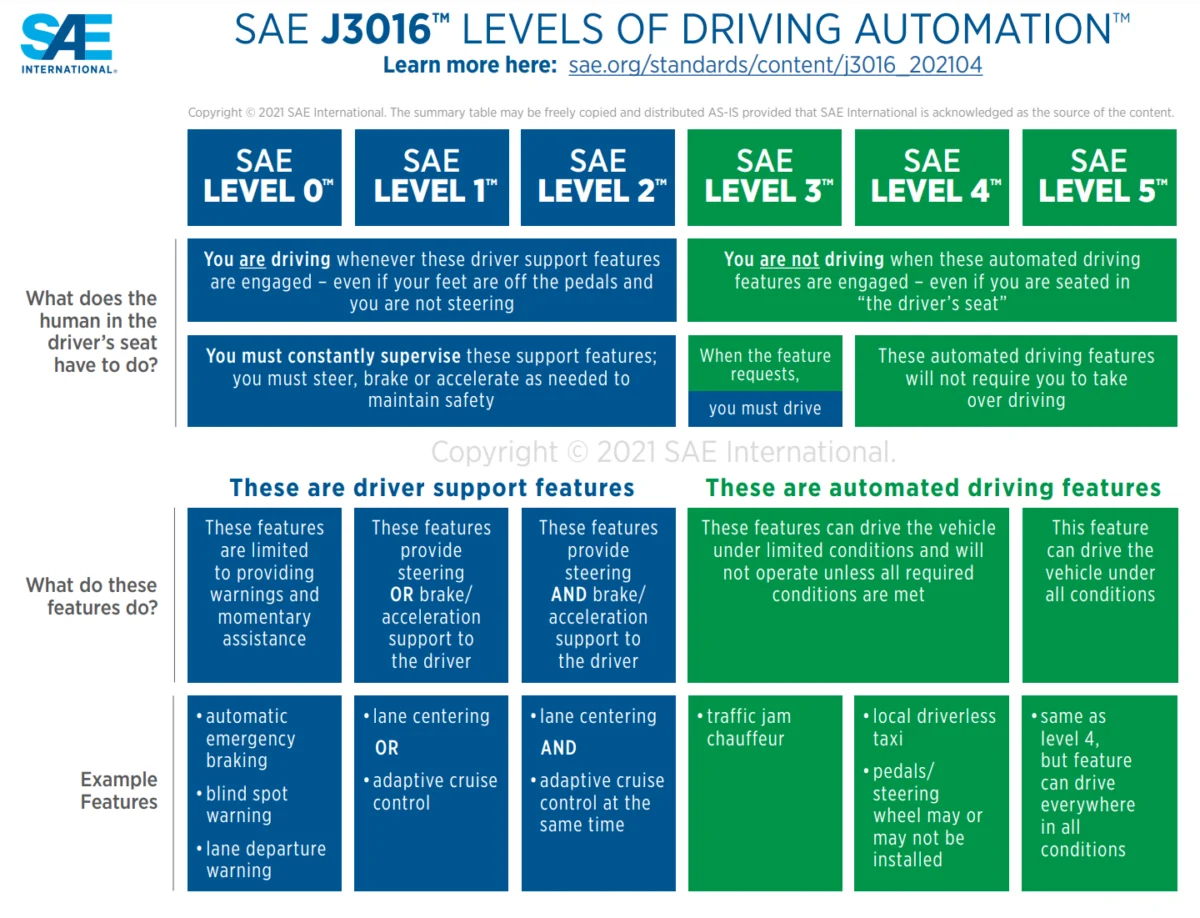
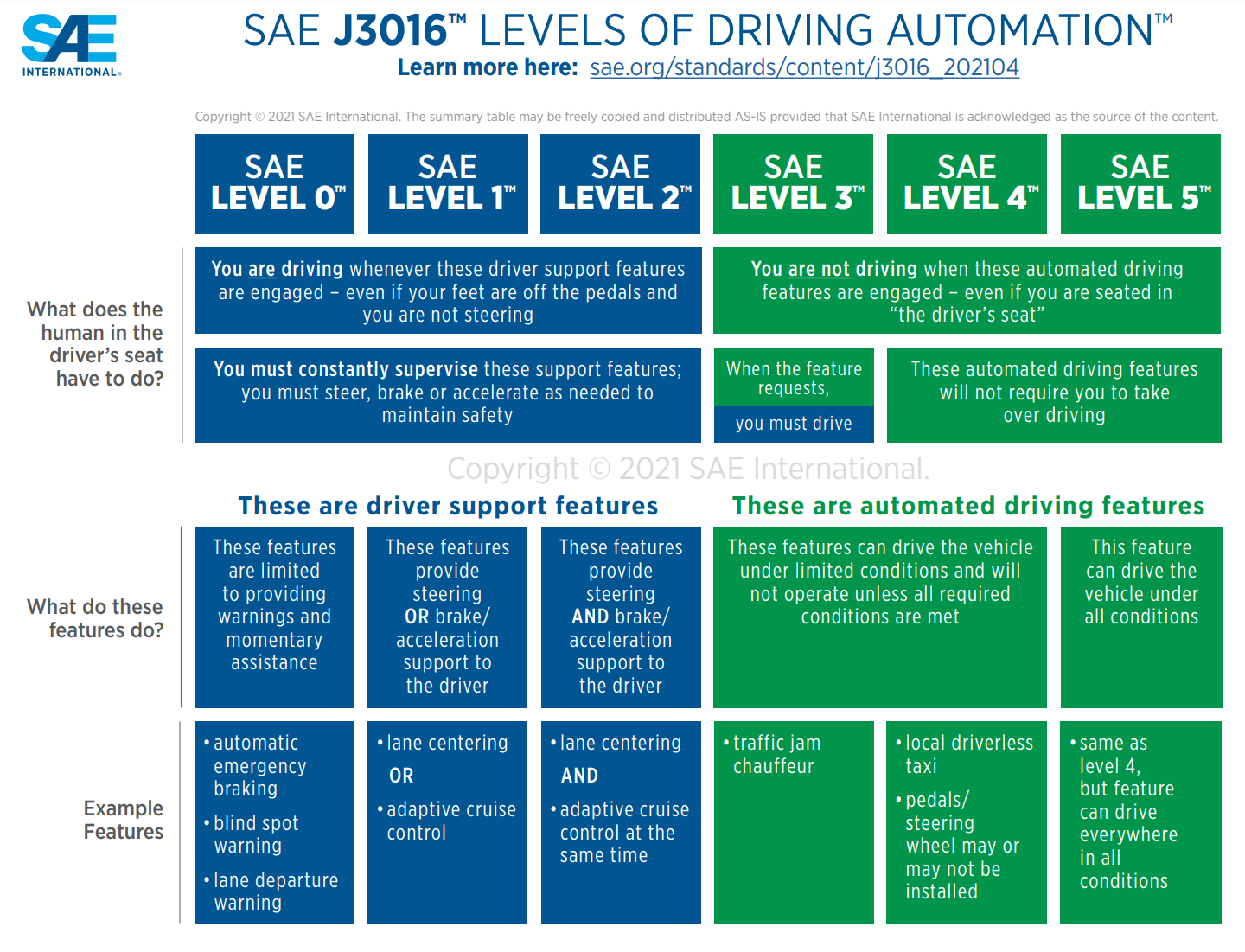
The Society of Automotive Engineers (SAE) J3016 standard defines six levels of driving automation, from Level 0 (no automation) to Level 5 (full automation). Levels 1 and 2 represent driver assistance features, requiring the human driver to remain fully engaged. Level 3 introduces conditional automation, where the vehicle can handle most aspects of driving, but the driver must be ready to intervene when prompted. Level 4, known as high automation, allows the vehicle to perform all driving tasks under specific conditions (e.g., within a geofenced area or particular weather), with no human intervention required in those operational design domains.
Level 5, however, is the "holy grail" of autonomous driving. It signifies an autonomous system capable of operating under all road conditions, in all environments, and at all times, equivalent to or surpassing a human driver’s capability. This includes navigating complex urban environments, adverse weather, diverse road types, and unpredictable human behavior without any human oversight. The distinction between Level 4 and Level 5 is critical: Level 4 still has an "Operational Design Domain" (ODD) – specific conditions or areas where it can operate safely. Level 5 removes these constraints, envisioning a vehicle that can drive anywhere a human can. Achieving this requires an unprecedented leap in artificial intelligence, sensor technology, and vehicle integration.
John Carmack’s Optimism and Jeff Atwood’s Skepticism
John Carmack, a figure synonymous with pushing technological boundaries, evidently believes that the industry is on track to overcome these immense challenges within the next six years. His initiation of the wager suggests a strong conviction in the rapid progress of autonomous vehicle technology and a desire to foster innovation. Carmack’s involvement in the bet is not merely about financial stakes; it’s framed as a "fun way to generate STEM publicity," aligning with his history of encouraging technological advancement and inspiring future engineers and scientists. His career, marked by groundbreaking achievements in real-time 3D graphics (Doom, Quake) and more recently in virtual reality (Oculus VR) and space technology (Armadillo Aerospace), positions him as an astute observer of complex engineering problems and their potential solutions.
Jeff Atwood, while deeply supportive of the concept of self-driving vehicles, takes the opposing side. His stance is rooted in the belief that the industry is "underestimating how difficult fully autonomous driving really is." Atwood explicitly states his desire for fully autonomous vehicles, envisioning a future where passengers can utilize travel time for reading, entertainment, or socializing, rather than driving. However, his skepticism arises from a realistic appraisal of the computational and engineering hurdles that remain. He views the challenge as a "fascinating, incredibly challenging computer science problem" and hopes his bet will serve as a strong motivator for developers to "prove him wrong" and accelerate progress towards the 2030 deadline. This perspective aligns with his broader pattern of pragmatic analysis regarding emerging technologies; for instance, he has previously expressed significant pessimism about virtual reality’s potential for widespread, world-changing impact in our lifetimes, favoring augmented reality and projection technologies instead.
The Current State of Autonomous Driving: A Long Road to Level 5
As of the current landscape, the autonomous vehicle industry is primarily operating at Level 2 and Level 3, with limited deployments of Level 4. Companies like Waymo (an Alphabet subsidiary) and Cruise (majority-owned by General Motors) have made significant strides, deploying robotaxi services in select cities such as Phoenix, San Francisco, and Austin. These services operate within carefully defined geofenced areas and often under specific weather conditions, representing Level 4 autonomy. They utilize extensive sensor suites—Lidar, radar, cameras—and sophisticated AI to navigate complex urban environments. However, even these Level 4 systems are subject to disengagements and occasional interventions, highlighting the remaining challenges.
Tesla, a prominent player in the EV space, employs a camera-centric approach for its "Full Self-Driving" (FSD) beta software. While impressive, Tesla’s FSD system is widely classified by experts as Level 2 driver assistance, requiring constant driver supervision and readiness to intervene. It does not meet the criteria for Level 5, or even Level 4, as it mandates human attention. The leap from Level 2/3 to Level 5 is not merely incremental; it requires a fundamental shift in reliability, redundancy, and the ability to handle an infinite array of "edge cases" – unforeseen or rare scenarios that autonomous systems struggle with.
Technical and Regulatory Hurdles to Overcome by 2030
Achieving Level 5 autonomy by 2030, particularly in the top 10 most populous U.S. cities, presents a multitude of formidable challenges:
- Perception and Sensor Fusion: Autonomous vehicles rely on a suite of sensors to perceive their surroundings. While current systems are advanced, they still struggle with adverse weather conditions (heavy rain, snow, fog), extreme lighting (direct sunlight, deep shadows), and occlusions (objects hidden behind others). Robust sensor fusion, combining data from cameras, radar, and lidar, needs to become infallible.
- Prediction of Human Behavior: Predicting the erratic and often illogical behavior of human drivers, pedestrians, and cyclists is incredibly difficult. AI systems must develop a "common sense" understanding of social dynamics and intent that currently eludes them.
- Planning and Decision-Making: Navigating complex urban environments involves myriad decisions: lane changes, turns, reacting to unexpected road hazards, construction zones, and emergency vehicles. Level 5 requires flawless decision-making in real-time, under all circumstances, including moral dilemmas in accident scenarios.
- Edge Cases and Long-Tail Problems: The sheer number of rare, unexpected situations an autonomous vehicle might encounter is astronomical. From an animal crossing the road to a mattress flying off a truck, or an unusual traffic accident, the system must handle these "edge cases" without failure. Training data for such rare events is scarce, making it difficult for AI to learn.
- Regulatory and Legal Frameworks: The current regulatory landscape for autonomous vehicles is fragmented, with different states adopting varying rules. A unified federal framework for Level 5 autonomy, addressing liability, certification, and operational standards, is essential for widespread commercial deployment.
- Public Acceptance and Trust: Despite the potential safety benefits, public trust in autonomous vehicles is still evolving. High-profile incidents, even if rare, can significantly erode public confidence. Widespread adoption of Level 5 vehicles will require demonstrable and consistent safety records that far surpass human driving.
- Cybersecurity: As complex, connected computer systems on wheels, autonomous vehicles present a significant cybersecurity attack surface. Protecting these vehicles from hacking and malicious interference is paramount.
Industry analysts widely acknowledge that Level 5 autonomy is an exceedingly difficult problem. While significant investment continues to pour into the sector, with billions of dollars from venture capital and automotive giants, many experts believe that a truly universal Level 5 system, commercially available across diverse and challenging major urban environments, may still be decades away. The consensus often leans towards a more gradual rollout of Level 4 systems, expanding their ODDs over time, rather than a sudden leap to Level 5.
Implications and the Broader Context
The Carmack-Atwood wager is more than just a bet between two tech luminaries; it serves as a public barometer for the industry’s progress and a catalyst for discussion. It highlights the immense technical hurdles that remain while simultaneously underscoring the revolutionary potential of fully autonomous transportation. Regardless of the outcome, the bet’s philanthropic nature ensures a positive contribution, while its public profile acts as an intellectual challenge to the brightest minds in AI, robotics, and automotive engineering.
Atwood’s reference to his other ongoing project—updating the most famous programming book of the BASIC era, with proceeds also going to charity—underscores his commitment to fostering educational and technological advancement. These initiatives, while distinct, share a common thread: leveraging the power of collaboration and intellectual curiosity to drive progress and give back to the community.
As the industry races towards 2030, the world will be watching to see if the ambitious vision of ubiquitous Level 5 self-driving cars can become a commercial reality in America’s largest cities. The wager between John Carmack and Jeff Atwood encapsulates the optimistic drive of innovation against the sobering realities of complex engineering challenges, setting a fascinating countdown for the future of transportation.